




Sebagai mekanisme transmisi, roda gigi planet banyak digunakan dalam berbagai praktik teknik, seperti reduktor roda gigi, derek, reduktor roda gigi planet, dll. Untuk reduktor roda gigi planet, dalam banyak kasus dapat menggantikan mekanisme transmisi rangkaian roda gigi poros tetap. Karena proses transmisi roda gigi adalah kontak garis, penggesekan dalam waktu lama akan menyebabkan kegagalan roda gigi, sehingga perlu untuk mensimulasikan kekuatannya. Li Hongli dkk. menggunakan metode penggesekan otomatis untuk menggesek roda gigi planet, dan memperoleh hasil bahwa torsi dan tegangan maksimum bersifat linier. Wang Yanjun dkk. juga menggesek roda gigi planet melalui metode pembangkitan otomatis, dan mensimulasikan statika dan simulasi modal roda gigi planet. Dalam makalah ini, elemen tetrahedron dan heksahedron terutama digunakan untuk membagi penggesekan, dan hasil akhirnya dianalisis untuk melihat apakah kondisi kekuatan terpenuhi.
1. Pembentukan model dan analisis hasil
Pemodelan tiga dimensi roda gigi planet
Roda gigi planetKomponen utamanya terdiri dari roda gigi cincin, roda gigi matahari, dan roda gigi planet. Parameter utama yang dipilih dalam penelitian ini adalah: jumlah gigi roda gigi cincin bagian dalam adalah 66, jumlah gigi roda gigi matahari adalah 36, jumlah gigi roda gigi planet adalah 15, diameter luar roda gigi cincin bagian dalam adalah 150 mm, modulus adalah 2 mm, sudut tekanan adalah 20°, lebar gigi adalah 20 mm, koefisien tinggi addendum adalah 1, koefisien backlash adalah 0,25, dan terdapat tiga roda gigi planet.
Analisis simulasi statis roda gigi planet.
Tentukan properti material: impor sistem roda gigi planet tiga dimensi yang digambar di perangkat lunak UG ke ANSYS, dan atur parameter material, seperti yang ditunjukkan pada Tabel 1 di bawah ini:

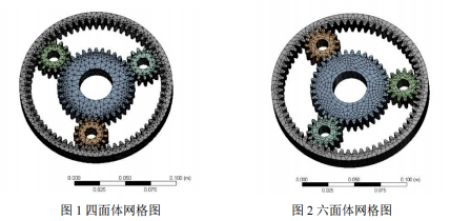
Pembuatan jaring: Jaring elemen hingga dibagi menjadi tetrahedron dan heksahedron, dan ukuran dasar elemennya adalah 5 mm. Karena ituroda gigi planetRoda gigi matahari dan cincin roda gigi dalam saling bersentuhan dan berpasangan, jala pada bagian yang bersentuhan dan berpasangan dipersempit, dan ukurannya 2 mm. Pertama, digunakan grid tetrahedral, seperti yang ditunjukkan pada Gambar 1. Sebanyak 105906 elemen dan 177893 node dihasilkan. Kemudian grid heksahedral diadopsi, seperti yang ditunjukkan pada Gambar 2, dan sebanyak 26957 sel dan 140560 node dihasilkan.
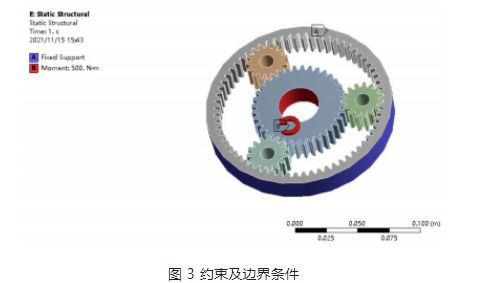
Penerapan beban dan kondisi batas: sesuai dengan karakteristik kerja roda gigi planet pada reduktor, roda gigi matahari adalah roda gigi penggerak, roda gigi planet adalah roda gigi yang digerakkan, dan keluaran akhir melalui pembawa planet. Tetapkan cincin roda gigi dalam di ANSYS, dan terapkan torsi 500N·m pada roda gigi matahari, seperti yang ditunjukkan pada Gambar 3.
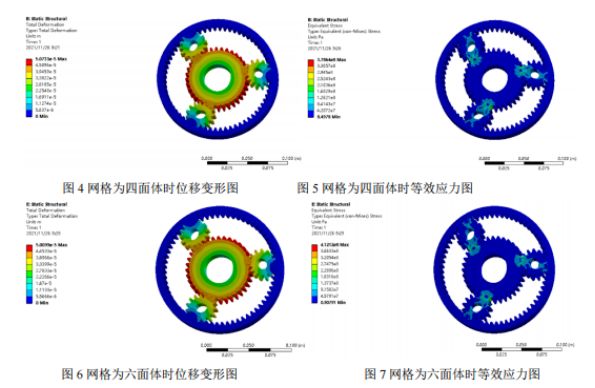
Pemrosesan akhir dan analisis hasil: Diagram perpindahan dan diagram tegangan ekivalen dari analisis statis yang diperoleh dari dua pembagian grid diberikan di bawah ini, dan analisis perbandingan dilakukan. Dari diagram perpindahan kedua jenis grid, ditemukan bahwa perpindahan maksimum terjadi pada posisi di mana roda gigi matahari tidak bersinggungan dengan roda gigi planet, dan tegangan maksimum terjadi di akar persambungan roda gigi. Tegangan maksimum grid tetrahedral adalah 378 MPa, dan tegangan maksimum grid heksahedral adalah 412 MPa. Karena batas luluh material adalah 785 MPa dan faktor keamanan adalah 1,5, tegangan yang diizinkan adalah 523 MPa. Tegangan maksimum dari kedua hasil tersebut kurang dari tegangan yang diizinkan, dan keduanya memenuhi kondisi kekuatan.
2. Kesimpulan
Melalui simulasi elemen hingga dari roda gigi planet, diperoleh diagram deformasi perpindahan dan diagram tegangan ekivalen dari sistem roda gigi, dari mana data maksimum dan minimum serta distribusinya diperoleh.roda gigi planetModel tersebut dapat ditemukan. Lokasi tegangan ekivalen maksimum juga merupakan lokasi di mana gigi roda gigi paling mungkin mengalami kegagalan, sehingga perhatian khusus harus diberikan pada hal tersebut selama perancangan atau pembuatan. Melalui analisis seluruh sistem roda gigi planet, kesalahan yang disebabkan oleh analisis hanya satu gigi roda gigi dapat diatasi.
Waktu posting: 28 Desember 2022